TL;DR: Logic Network Flow (LNF) is a novel formulation for temporal logic specifications with provably tighter convex relaxations and fewer constraints than standard Logic Tree approaches, achieved by projecting Graph-of-Convex-Sets onto lower-dimensional spaces using Fourier-Motzkin elimination.
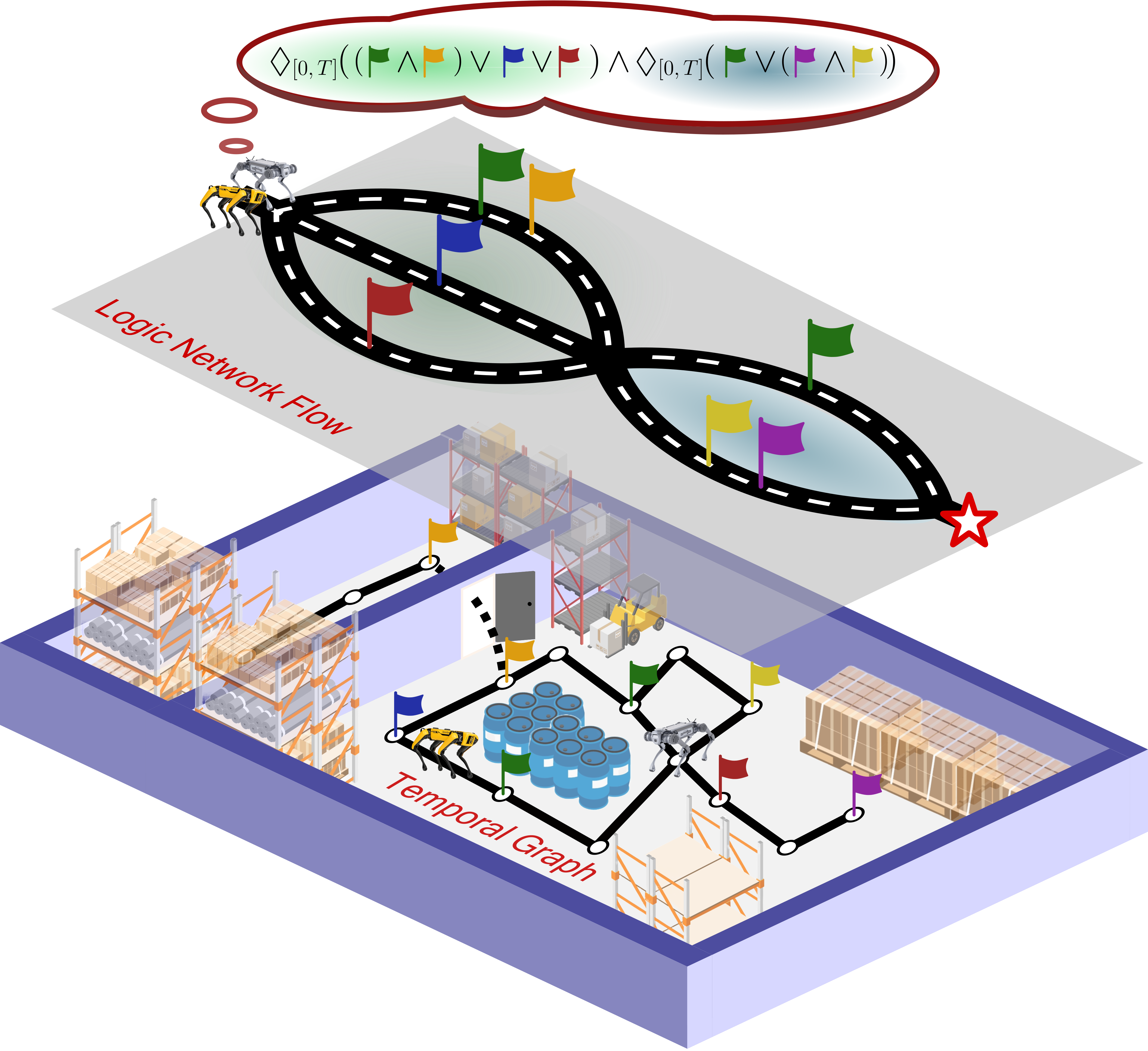
This paper proposes an optimization-based task and motion planning framework, named "Logic Network Flow" (LNF), to integrate temporal logic specifications into efficient mixed-integer programs. Temporal predicates are encoded as polyhedron constraints on each edge of a network flow model, instead of as constraints between nodes as in traditional Logic Tree formulations. This leads to provably tighter convex relaxations and fewer constraints when synthesized with various piecewise-affine (PWA) dynamic system formulations. Comprehensive experiments across vehicle routing, multi-robot coordination, and temporal logic control on dynamical systems using point mass and linear inverted pendulum models demonstrate up to orders of magnitude computational speedups.
Three bipedal robots coordinate to execute search and rescue operations, equipment retrieval, and fire extinguishing tasks in a disaster zone.
Optimized footstep planning for bipedal walking robots using temporal logic specifications with safe contact regions.
Three robots follow conflict-free trajectories to complete tasks across multiple rooms, demonstrating efficient path planning and scheduling.
A quadruped robot is physically dragged off course and encounters a new obstacle. It dynamically replans under temporal logic to reach an alternative feasible target.
For vehicle routing problems formulated as temporal logic specifications with dynamic network flow, our computational results demonstrate that LNF achieves consistently tighter convex relaxation gaps, leading to significant speedups compared to Logic Tree formulations across different problem sizes.
| 3 Robots, 9 Tasks, N=50 | 6 Robots, 18 Tasks, N=70 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| LNF | LNF-w/o F-M | LT | Speedup | LNF | LNF-w/o F-M | LT | Speedup | ||
| # binary vars | 245 | 245 | 245 | - | 1242 | 1242 | 1242 | - | |
| # continuous vars | 17,645 | 242,800 | 17,656 | - | 48,994 | 1,524,490 | 49,013 | - | |
| # constraints | 9,614 | 241,264 | 11,897 | - | 26,376 | 1,527,738 | 32,283 | - | |
| Root relaxation gap (%) | 6.7±3.1 | 6.7±3.1 | 31.2±4.3 | - | 8.1±2.0 | 8.1±2.0 | 38.0±1.7 | - | |
| Gurobi | T-Find (10%) | 1.1±0.4 | 266.0±89.5 | 5.7±2.3 | 5× | 49.2±5.3 | 2580.9±1161.4 | 1178.8±244.9 | 24× |
| T-Find (optimal) | 1.8±0.6 | 643.8±329.1 | 22.6±14.9 | 12× | 570.0±245.9 | Timeout | Timeout | >18× | |
| T-Prove (10%) | 1.2±0.4 | 337.7±117.3 | 22.4±14.5 | 19× | 49.4±6.5 | 3675.0±893.3 | 1990.6±810.0 | 40× | |
| T-Prove (optimal) | 1.7±0.8 | 1202.6±849.9 | 52.9±34.6 | 31× | 779.2±409.8 | Timeout | Timeout | >13× | |
| CPLEX | T-Prove (optimal) | 13.0±9.6 | Timeout | 4475.7±3501.7 | 344× | 1127.0±566.0 | Timeout | Timeout | >9× |
In this paper, we propose a temporal logic formulation based on a Graph of Convex Sets (GCS) backbone and simplify it using Fourier-Motzkin elimination. The proposed Fourier-Motzkin approach can be extended to simplify broader GCS formulations beyond temporal logic specifications. We will continue to add more results here.
This work was supported in part by the Office of Naval Research (ONR) under Grant N000142312223; in part by the National Science Foundation (NSF) under Grant IIS-1924978, Grant CMMI-2144309, and Grant FRR-2328254.
@article{lin2025towards,
title={Towards Tighter Convex Relaxation of Mixed-integer Programs: Leveraging Logic Network Flow for Task and Motion Planning},
author={Lin, Xuan and Ren, Jiming and Luo, Yandong and Xie, Weijun and Zhao, Ye},
journal={arXiv preprint arXiv:2509.24235},
year={2025}
}